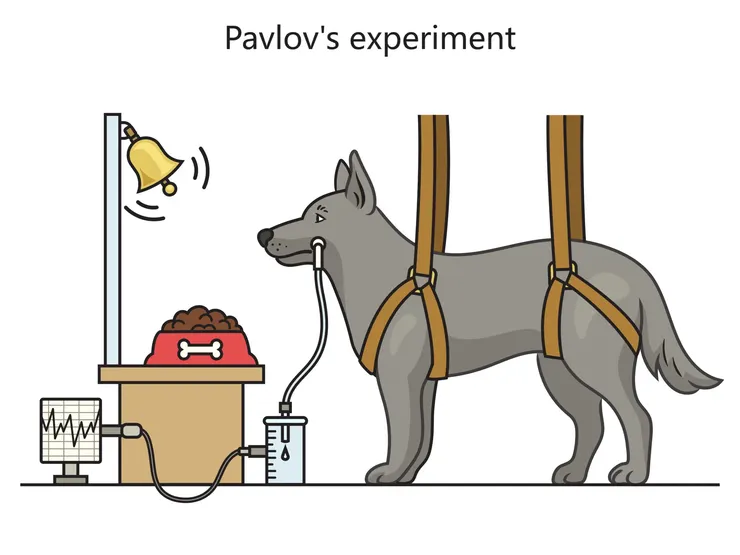
古典制約:訊號刺激能提供動物情報預測事件發生順序替接下來反應做準備(捷運站台閃爍紅燈 表示捷運即將進站 乘車民眾陸續排隊)在古典制約當中 捷運本身有進站時刻表 不因為站台是否有人排隊而進站停車
訓練狗的情況 人類準備出門 靠近門口將門打開 此時狗預測事件發生 堵在門縫要鑽出去 門被打開不是因為被狗控制而是人打開的 狗只是配合事件發生而選擇做出相對應的行為
操作制約:動物選擇做出行為控制事件發生得到相對應的後果(路上有計程車 搭車民眾在路旁招手 計程車停靠載客)在操作制約當中 計程車是因為乘客招手才上前載客 計程車不因為路上有行人行走而一直停靠路邊
訓練狗的情況 狗靠近自動門 門感應打開 狗進便利商店吹冷氣 門打開是因為狗的行為控制事件發生
古典制約下訓練的狗會比較穩定 但是缺乏創造力 越準確規律容易預測的情況下學習越快發生
操作制約下訓練的狗會比較活躍 但是具備不確定性 行為影響的後果越明顯學習越快發生
延遲制約:學習效率不好 因為時間間隔太久無法連結前後事件關聯 高速公路開車 導航系統顯示右轉下交流道 司機開車30分鐘才看到交流道岔路口 很難預測何時是正確時間點做出反應
訓練狗情況下 狗害怕打雷 打雷過完30分鐘你才拿零食做古典反制約 沒有減敏效果(讓狗對雷聲習慣化 覺得打雷是好事情 因為有零食吃)
超前制約:學習效率最好 高速公路開車的時候 導航系統顯示100公尺後右轉下交流道 所以司機提前靠右邊車道做準備 刺激訊號會先提前告知情報 動物可以預測並做出準備
訓練狗的時候 超前制約可以讓狗專注接收指令在完整的把動作做好 而不是急急忙忙把動作亂做 或是根本來不及反應
同時制約:學習效率不好 高速公路開車的時候 已經到下交流道的岔路口 導航系統才顯示右轉下交流道 司機無法預測提前做出反應(來不及轉彎)下次司機會忽略導航系統顯示而自己認路或找路牌(導航系統無法信任) 刺激訊號無法提前告知情報或是提供錯誤資訊
訓練狗的時候 同時制約沒辦法讓狗搞清楚事物發生順序的關聯 狗對於動作的接收順序比聲音優先 這是為什麼你喊口令狗忽略沒反應 因為他聽不懂口令只認手勢 或是在狗公園叫狗回來 訊號同時發生衝突 狗認為過來等於抓回家不能繼續玩 所以越跑越遠 訓練狗的時候一定要避免這種衝突發生
逆向制約:完全沒有學習效果 高速公路開車 已經下交流道 導航系統才顯示100公尺後靠右車道下交流道 司機只會認為機器故障
訓練狗的情況下 正確順序是先出現鈴聲 再出現食物 狗會分泌唾液 錯誤順序 先出現食物 再出現鈴聲 狗分泌唾液是因為出現食物 跟鈴聲沒有連結 當單獨只出現鈴聲 狗不會分泌唾液 因為沒有發生學習