上篇介紹如何使用 mpu6050 感測器 加速度 感測器取得傾斜角度,這篇介紹如何使用低通滤波器(Low-Pass Filter) 來改善 傾斜角度數值。
低通濾波器的想法是去除高頻率的干擾,當mpu6050左右搖晃時,因為加速度數值改變,造成傾斜角度數值變化,但實質上傾斜角度並沒有變化,因此要使用低通滤波器(Low-Pass Filter)去除劇烈的數值改變。pitchN=0.9*pitchOld+0.1*pitchM; (讀取的Pitch 角度=0.9 舊角度+0.1新角度)
rollN=0.9*rollOld+0.1*rollM;(讀取的Roll 角度=0.9 舊角度+0.1新角度)
程式寫法是讀取的新角度是舊角度加上量測到新角度的數值,給予舊角度0.9的權重,新角度0.1的權重,比較相信原本的數值,意味者當數值在短時間劇烈改變時,因為量測到的角度佔的權重小,因此不會造成量測角度太大的變化。
#include <basicMPU6050.h>
#include <math.h>
// Create instance
basicMPU6050<> imu;
float pitchM,rollM,pitchN,rollN;
float pitchOld=0;
float rollOld=0;
void setup() {
// Set registers - Always required
imu.setup();
// Initial calibration of gyro
imu.setBias();
// Start console
Serial.begin(38400);
}
void loop() {
// Update gyro calibration
imu.updateBias();
// Angle
pitchM=atan2(imu.ay(),imu.az())*180/3.14159;
rollM=atan2(imu.ax(),imu.az())*180/3.14159;
//low pass filter
pitchN=0.9*pitchOld+0.1*pitchM;
rollN=0.9*rollOld+0.1*rollM;
Serial.print( imu.ax() );
Serial.print( " " );
Serial.print( imu.ay() );
Serial.print( " " );
Serial.print( imu.az() );
Serial.print( " " );
//Angle
Serial.print(pitchM);
Serial.print(" ");
Serial.print(rollM);
Serial.print(" ");
Serial.print(pitchN);
Serial.print(" ");
Serial.print(rollN);
Serial.println(" ");
//assign now value to old value
pitchOld=pitchN;
rollOld=rollN;
delay(100);
}
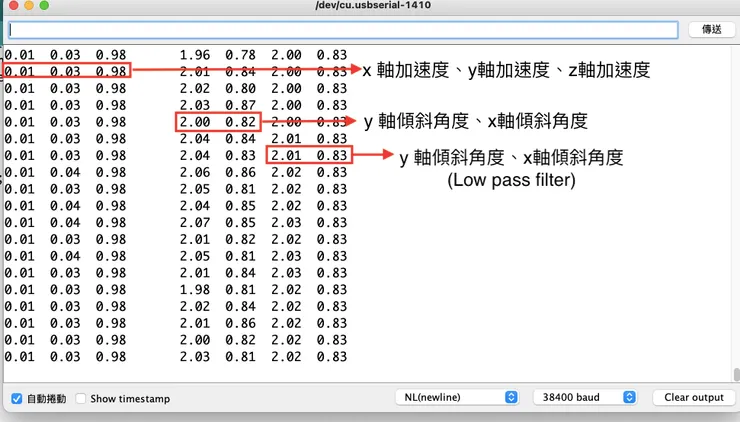
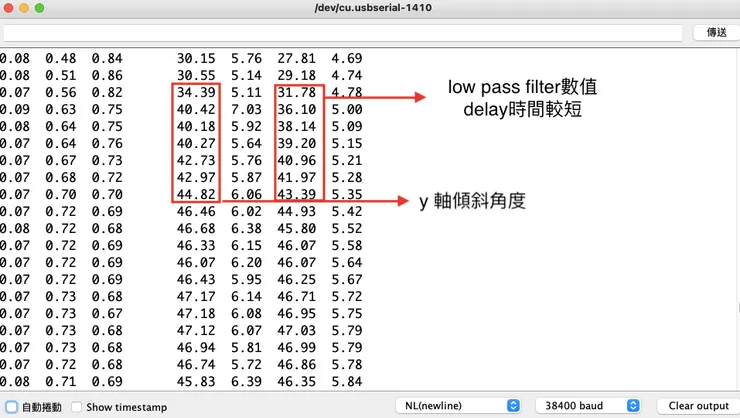
讀取數值如下
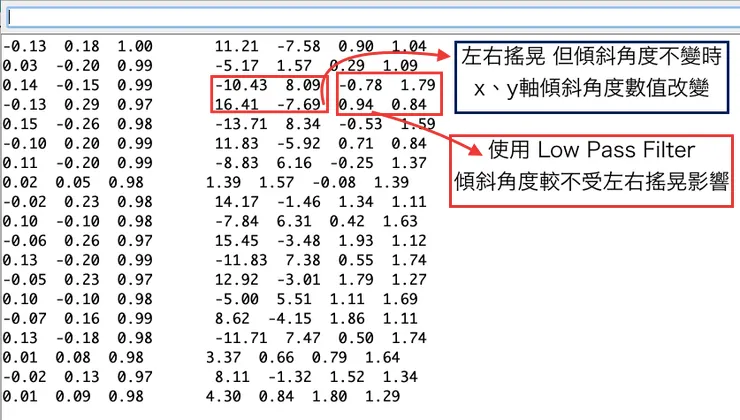
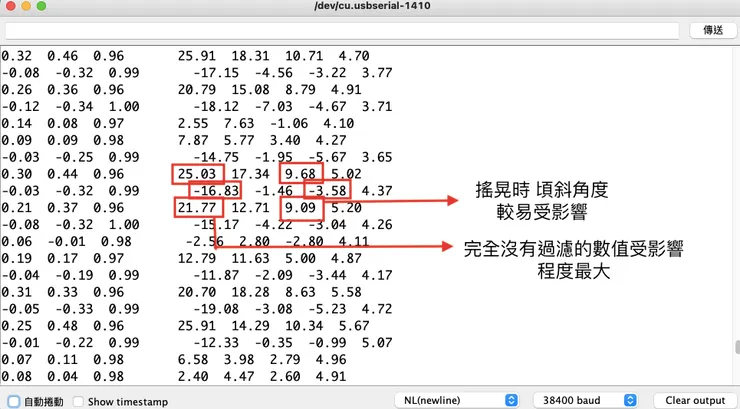
左右搖晃時感測器讀取的數據
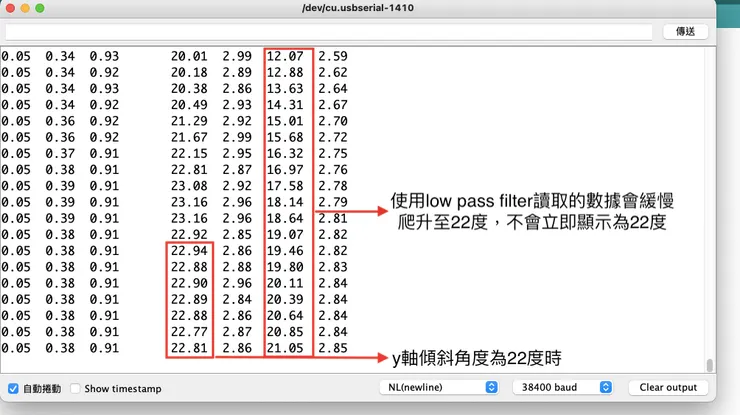
但是還是有些缺點,使用low pass filter 過濾的數值無法立即顯示目前傾斜角度,數值會漸進的爬升至22度。
low pass filter的權重會影響數值的爬升速度,原本的權重分別為0.9 和0.1
pitchN=0.9*pitchOld+0.1*pitchM; (讀取的Pitch 角度=0.9 舊角度+0.1新角度)
將權重改成0.5和0.5時
pitchN=0.5*pitchOld+0.5*pitchM;(讀取的Pitch 角度=0.5 舊角度+0.5新角度)
會使讀取的數值爬升速度快(反應較快),但搖晃時傾斜角度的數值較易被影響。
權重改成0.5和0.5時 y軸傾斜時
權重0.5和0.5時 左右搖晃時
若希望傾斜角度可以立即反應到數值上,就給予新角度較高的權重,若希望能降低搖晃的干擾,就給予舊角度較高的權重,使用Low-Pass Filter會面臨到反應速度和降低干擾的取捨。
這是簡單的Low-Pass Filter 應用在mpu6050感測器介紹。