本文是要詳細介紹面對不同槽極配的馬達時,集中繞(Connected Winding)的繞線方法會有甚麼變化;其中包括了繞線的順序規則改動、每槽對應的順時針或是逆時針的繞向法則以及不同繞法對於繞線因素的衰減比例關係計算。倘若繞線順序或是方向錯誤時,輕則是繞線因素(Winding Factor)偏低,影響馬達效能下降,重則是馬達壓根無法運轉,實際生產時需要特別注意。
除了基本的原則解說之外,還會以14極12齒的作為實際案例,如下圖所示,以利更為直觀的理解馬達繞線相關法則。
14極12槽配置
首先是電氣角(Electrical Angle)的計算,由於馬達內部的運作是以磁場變化作為標準的,因此將一組SN(南北)極視作360度的電氣角度,亦代表一片磁鐵就等同於180度的電氣角。由此可知本案例中的14極馬達,將其乘上180度後,總共將擁有2520度的電氣角變化。
獲得了總電氣角度後,再將其除以定子齒數,就可以獲得每一齒所均分的電氣角度值;其計算的數學式如下,其中P代表馬達的磁鐵極數(Pole),T為馬達的齒數(Tooth),而Ae就是齒均分電氣角度。

齒均分電氣角度計算式
獲得齒均分角度Ae之後,將其乘上各齒對應的槽數,就可得到每一齒的對應電氣角度值。以本案例來計算,就是2520/12=210度,則對應的齒數可求得電氣角排列如下表所示。由於角度超過360度後,其實又回到0度,故可再次化簡,將超過360度的數值收縮至360度以內表示,整理完成後如下表,則可得到每一齒的簡化電氣角度值。

每齒所對應的電氣角度
這些計算所得的每一齒電氣角度也就代表在這一齒繞線後,其通電生成的磁場角度。但需要注意,此時還可以利用順時針繞線或是逆時針繞線的影響,來改變其對應的磁場角度。以下圖為例,在第一齒順時針捲繞漆包線,並將其定義為N極,若想要改變第二齒的電氣角度時,則可將其改為逆時針繞線,由於磁場電氣角中SN極相差180度,就可使得第二齒的210度直接扣除180度或是增加180度再化簡,最終都會得到30度。

繞向更改電氣角度
之所以還要利用繞向改變電氣角度,主要是需藉此技巧來平分馬達內部磁場角度,讓馬達能均勻穩定運轉。以三相馬達為例,代表馬達內部會有三組不同相位的線圈,將其依序通電來使馬達運轉;此時這三組漆包線圈應均分馬達內360度的磁場電氣角度,也就是當第一組漆包線圈對應到0度角時,第二組則應當落於120度,最後一組線圈應為240度,方可使馬達內部磁場平均運作。
然而對照了每齒的電氣角可發現,確實有對應到0、120、240度的齒數,但其它齒的電氣角度顯然並不正確。而12齒還需要分為三組,代表每一相應當有4齒的漆包線圈,如何將其統整形成三相各距120度電氣角的成果,就是馬達繞線法則的基礎邏輯;如下圖所示,須將每一相內的四齒電氣角合成,最終使得各相間距為均衡的120度,就是正確的繞線條件。
三相均勻,相距120度電氣角
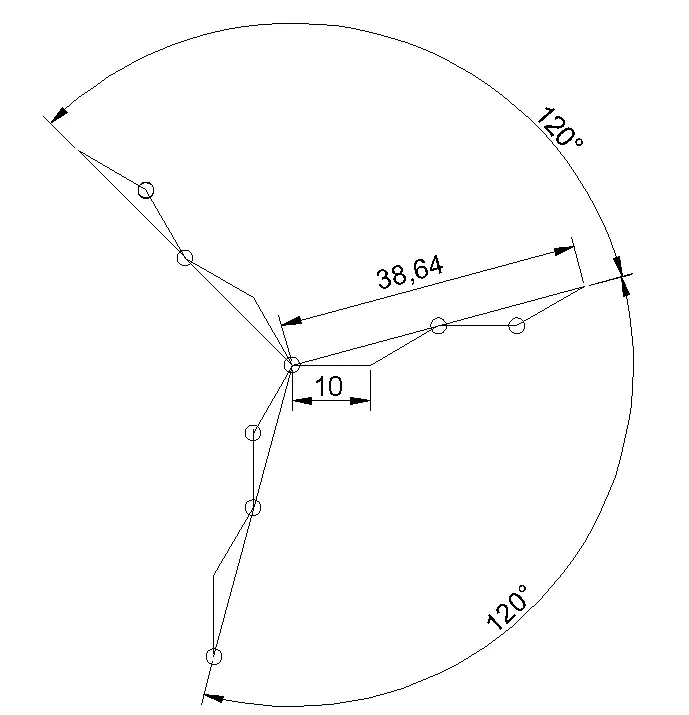
由此可知為了達到均分間距120度電氣角的理想條件,就可以利用順逆繞的技巧,將每齒對應的電氣角度進行調整。下表為導入繞向變化的每齒電氣角度,此時就可直接觀察到1、2、7、8齒的電氣角度較為相近,分別為0度及30度,而3、4、9、10齒皆為240度及270度,5、6、11、12齒則為120度及150度,如此分組後就可以發現三組各齒所對應的電氣角度確實可以形成相差120度的配對組合,也就是0度、120度及150度,以及30度、150度及270度。若將其繪製於圖紙上,將每一齒的線圈視作為一個向量,也就是長度為10,而角度則為其對應的電氣角,就可以如上圖所示,畫出三個相差120度的向量線段,個別是由4條線段所組成。

改變繞向後每齒所對應的電氣角度
量取繪製完成的向量線段長度,會發現其數值38.64短於4條線段的總和40,這差的部分就是所謂的繞線因素,一般會以比例關係來描述,也就是38.64/40=0.966;對應到實際的馬達情況上,就是繞了40圈的漆包線圈,但最終實際產生磁場的效果僅為38.64圈,也就是付出的材料與實際獲得的收益形成了落差。
需要特別注意,針對單一槽極配而言,可接受的繞線條件往往並非唯一,僅需要維持各相線圈均衡分配360度電氣角即可。但不同的繞法會有不同的繞線因素,就會具備有容易生產但繞線因素低,或是為了達到最高繞線因素而導致生產耗時,因此可以依特定條件來決定最終的製造規格。
重點整理:
馬達的基本原則是簡單的,後續的執行判斷就是真功夫了。
#可擔任業界顧問、講師
#個人經營歡迎贊助
馬達技術傳承計畫
想要馬達的技術嗎?想要的話可以全部給你,去找吧!
我把所有的知識都放在那裡了。



















