前言:原本打算一鼓作氣寫完整篇馬達基礎的部分,但寫者寫者發覺越來越多,實在難以為繼,只好進行切分讓自己輕鬆一些,希望最終不要分得太過零碎。
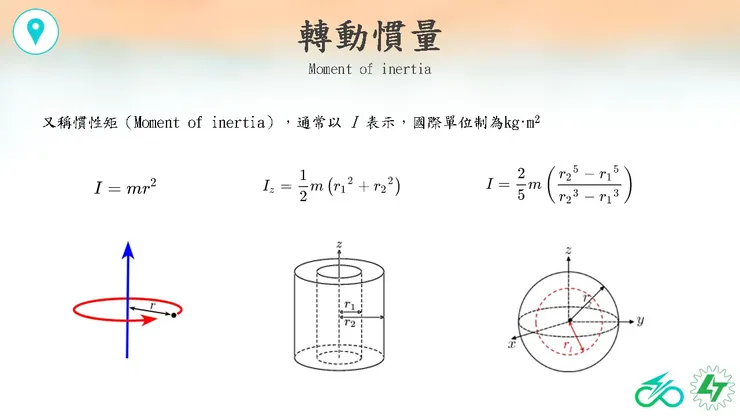
嚴謹定義的慣量數學表示式如下,可以發現仍與質量m是有著直接關聯性,以等號的關係表示;但可以明顯發現多了一個旋轉半徑的r,且為次方項關係,這是用來描述此質量的迴轉距離之影響;若是覺得難以理解,可以簡單的比對太陽與地球的關聯,可以想一下地球繞著太陽旋轉的情況,地球就是正對太陽的一個轉動慣量。

實際上,隨著旋轉物體形狀的各種變化,如圓柱體或是球型,要計算出此物體的質量中心,就顯得越來越複雜,但也僅是一些數學上的公式調整而已,基本涵義是相同的,都是用來表達此物體的質量中心及其正對旋轉軸心的半徑值;但若是面對真正的馬達轉子時,其慣量的計算往往就無法採用單純的數學方式求得。

之所以馬達轉子慣量難以計算,主要是受到其構成結構過於複雜的限制,不僅僅是外觀形狀所造成的尺寸差異,甚至還包括不同的材料種類密度的變化,以及生產過程中的偏差量等現實原因,都大幅加劇了數學計算的實際難度。例如有刷馬達的繞線轉子,單是線圈會受到繞線時的各種分布不穩定性,先後生產的不同顆馬達轉子慣量值差異就可能高達10%以上;而感應馬達所使用的灌鋁轉子製程則相對穩定,慣量誤差應當可以控制在3%以內,但感應馬達轉子矽鋼片的造型特殊,同時還需要做斜槽的設計,大幅增加了利用數學運算慣量的操作難度;無刷馬達的磁鐵轉子看似單純,但磁鐵內的鐵粉與其他填充物,倘若受到了生產技術管控不佳的干擾,並沒有均勻分布,也會導致各位置點的質量值有明顯誤差,無法利用相同的數值來進行計算;諸如此類的現實條件因素都將導致馬達轉子慣量難以使用基礎理論計算求得。
其實在數學理論上,也是有考慮到複合材料的質量以及各自不同的質量中心,將慣量方程式擴增定義如下;其真實涵義是類似將轉子內部結構個別拆分後計算,最終再進行加總的作法,因此能以相對籠統的數學形式表達如下。但這也僅是解決了數學公式上的定義解釋,在實務操作層面來說仍是無法有效執行。

雖然知道了利用數學計算的方式,難以獲得真實轉子慣量的資訊,但其實仍有其他辦法與量測儀器可以進一步獲得轉子的慣量值,因此在實務應用上也就沒有那麼龐大的計算壓力了;但還是再次強調,其底層的基本原理知識仍需要具備,產生錯誤時才有具備修正改善的能力。
由上述可知,當有一個物體具備質量,且繞著一個軸心進行旋轉時,皆會有一個轉動慣量產生;一旦轉子受到外部能量影響,開始旋轉運動起來,達到最高轉速的狀態時,轉動慣量就會如同海綿一般,吸收儲存了滿滿的動力能量,後續則會受到各種外部損耗的影響,而減慢轉速直至停止。這其實與直線運動的動能作用是相同的運作模式,但僅是運動方式不盡相同而已;但由於旋轉運動容易被誤會為沒有前進動力,讓人難以聯想成汽車那類的線性運動型態,就不容易被一般人發覺轉子慣量上其實儲存了能量,具備如同電池一樣的作用性質,也是一種儲能裝置,這點需要謹記於心。
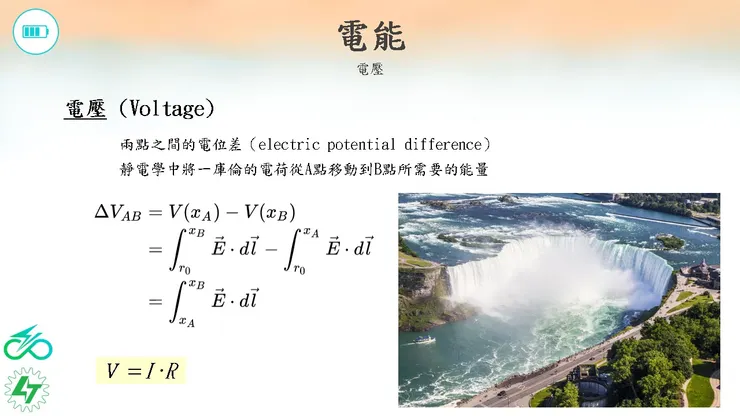
介紹完了馬達的輸出能量部分,其中包括了動能、位能以及我們並不希望產生的熱能之後,再來就是屬於馬達輸入能量的介紹,也就是電能;其中會劃分為電壓及電流兩大主軸,以及對應生成的電感及電容。對筆者而言,電壓亦為一種位能狀態,僅是專屬於電能的領域當中,具備獨立的名詞來加以定義。但筆者老覺得"電壓"這名詞取得不如"電位差"傳神,若是採用了電位差的觀點,就能很簡單的理解"電壓"是兩物體之間具備的電位能狀態不同,將其相比較之後的偏差數值;並且由於兩者之間有了相對的高低電位落差,也就是電壓之後,還會造成電荷從高電位處往低電位處移動的自然現象,這移動的現象就是電流。
其實電壓與電流這情況就類似水的表現,就如同水往低處流,而當水流經兩個位置點的高度落差太大時,甚至會產生瀑布;而瀑布上下兩端的位置高度差異,就可以比擬成能量的落差,在電能的定義當中,就是電位差,也就是電壓。有趣的是,電能在絕大部分的物理規則表現上,都十分類似水;每當對電的概念產生理解困擾時,不妨與水的情境對比一下,可以更方便地理解與記憶。
藉由上述的說明,可以簡單理解"電壓"是在描述兩處所擁有的電位差異,因此當兩處的電位高度相同時,代表兩者之間沒有電位差,也不會有電壓值,亦不會有高處往低處流的電流形成;反之,當兩處有電位落差時,兩點間的電位差異就是電壓值,而電流也會依照電位差的大小而隨之變化。這樣的情境,其實就如同河流的表現,當高低落差相對小的時候,河流往往看起來很十分平緩,觀察不到明顯的水流變化;而當我們能觀察到河流湍急甚至有瀑布產生時,代表兩處的高度變化是急遽的;將河流的經歷對比至電能的世界當中,用來定義兩位置的高度差異,就是電壓。
另一個奧妙的地方則是電壓並非是絕對值,而是屬於相對值的存在,因此人往往並不會知道自己本身的電位,以及其他物品的電位值,這就會造成明明看起來沒有電的物品,但在某些情況下接觸後,會有被電到的感受,而且瞬間就消失,這就是俗稱的靜電反應,但這往往也僅有一個瞬間,之後再摸又沒事了;這是因為原本人跟物品之間,受到某些影響造成了兩者間的電位差,但接觸之後,電流會瞬間流向人體,調和了人與物品之間的電位,僅而使得電位差消失了,電流也就不再流動,此刻兩者的電位是相同的,就沒有了電壓值。
而嚴謹的電壓定義,是在講述電荷移動時所需要的能量,而這其實也與動能的定義如出一轍,是描述一個質量移動時所需要的能量;所以單就宏觀的能量定義來看,電能跟動能是可以互通的,但就是狹義的定義會有個別差異。
然而,最常使用的電壓表示式,並非採用嚴謹的定義式,而是使用歐姆定律(Ohm's law),如下所式,其中V代表電壓值,I為電流值,R是電阻值;公式當中直白的告知我們,電壓為電流與電阻的相乘。實際上歐姆定律對筆者而言,是個奇特的迴圈,電壓、電流及電阻這三項參數當中,任兩項已知的情況下,第三項就可以計算求得;而進一步說,拜現今科技進步所賜,這三項數據都十分容易透過儀器取得,往往並不需要嚴謹地計算,這也是電壓的原始定義公式會被忽略的主因。
但也由於電壓值太容易量取,使人容易忽略掉了本身的意義,僅被視為一組數值的存在,進而容易在使用上有所迷失無法妥善運用。實務上筆者遇到的反面案例就是12V的電動車規劃,如此不切實際的設計方案;要知道Toyota的Hybrid車款,馬達端的工作電壓最低為207.2V,最高則拉到650V,這些都需要藉由升壓的手段來增加電能輸入的功率,而12V的電動車設計概念顯然就忽略了電壓的助益,打算僅依靠電流來擴增功率值;就如同明明手握利器,卻寧願空手上陣拚搏的感覺,非常不合理。
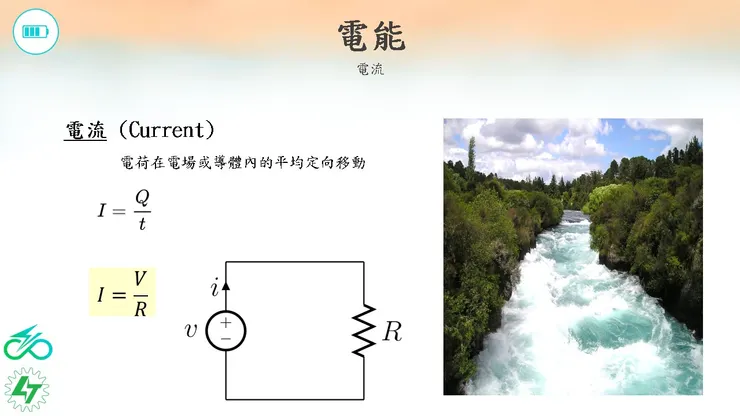
相比於"電壓"一詞的難以理解,"電流"這名詞就取的相當巧妙,確實是將電流對比於水流一樣的存在。當我們認知電流就如同水流時,那應該進一步意識到電流也是具備了流量、流速還有方向性的存在;而水流的方向性就是高處往低處流,而電流也同樣是從高電位往低電位處移動,而這高低處的電位差就是電壓,進而可以知道電壓越大則電流越大,而這電流大對比於水流的情況,應該代表其流量大且流速也快,因此可以發現電流的基本定義數學式如下。
其中I代表電流,Q則是電量,t為時間,由此可見電流確實正比於電量的大小值,代表電量越大則電流越大,等同於水的流量大小;公式中電流反比於時間,其實就是流速的表示式,代表時間越短則流速越快,電流也就越大,與水的物理現象一致。因此無論是由物理層面來理解,或是從數學式來看,當電流I越大就代表流經的電量Q越多,而且經過的時間t很短暫,意味著流速很快,也會造成電流值的增加,這一切都如同我們觀察到水流湍急的情況相當。
然而電流也遇到了跟電壓相同的使用習慣問題,由於現今的儀器太容易量測電壓與電流的數值,導致電流的常見數學式仍以歐姆定律為主,僅是修改了排列順序,以電流為優先描述項,將電壓V除以電阻R,就可以得到電流I的數值。
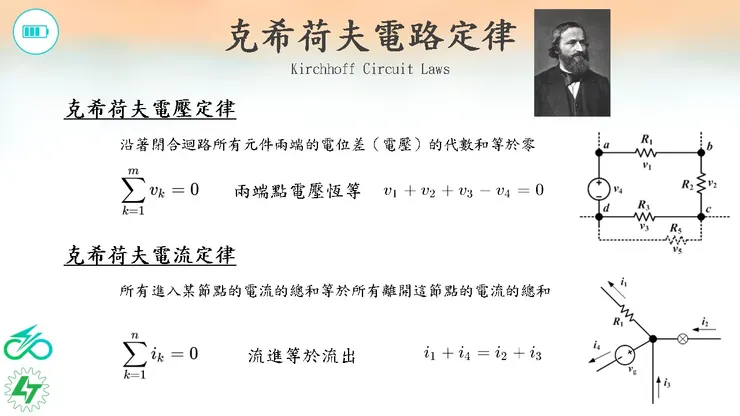
此外,針對電壓及電流,有兩個經常會用到的定律,就是克希荷夫電路定律(Kirchhoff Circuit Laws),這是個讓筆者面飲恨的法則,源於筆者於機械系的推甄面試時,竟然會被問到克希荷夫電路學的問題,使得筆者訝然,因此筆者對此名字有了深刻的印象;但不得不說,教科書的解釋相當繞口,還難以理解,在缺乏實務經驗的情況下,就如同魔咒一樣生硬,使得當時筆者無法妥善理解。
克希荷夫電壓定律告知我們,在封閉迴路內的元件電壓總和為零;這句話即便勉強背起來了,還是無法得知這定律的作用。但實際上這是個好用的分壓原則,當手上有個24V電源,想要拆解為12V使用,則只需要串聯兩組相同電阻值的元件,就可以從任一元件的兩端,接出12V的電壓使用。因此克希荷夫電壓定律對現今的筆者而言,則是告知在單一電源迴路當中,可藉由不同的元件獲得不同的電壓值,而此封閉迴路內的最大上限值就是電源電壓,從此意味著我們擁有了分配電壓值的權力。
而克希荷夫電流定律在教科書的解釋為流進等於流出,這感覺就是一句非常經典的廢話語錄,好記但沒啥作用,難以讓人深刻體會。實務上的運用,是要告知我們,電流是可以匯集並重新分配,這運作方式就如同水一般,可以藉由多條小河匯集成大河,也可以藉由疏洪道的設計,來分枝分流後降低各線道的水流量;因此當需要大電流時,可以藉由合併電流來達成,反之當電流過大產生困擾時,則可利用分流技巧,降低電路上的電流密度;由此可知,克希荷夫電流定律代表我們可以依照各自的需求調整電流的分配。
上述就是為何克希荷夫電路定律重要的原因,告知了我們無論是電壓或是電流都是可以重新調整及分配的,如此一來應用的可行性就大幅增加了,不在受到限制,可以依照個人需求進行調配,賦予了電壓及電流更多的操控性,這是現在電子業蓬勃發展的重要基礎之一。
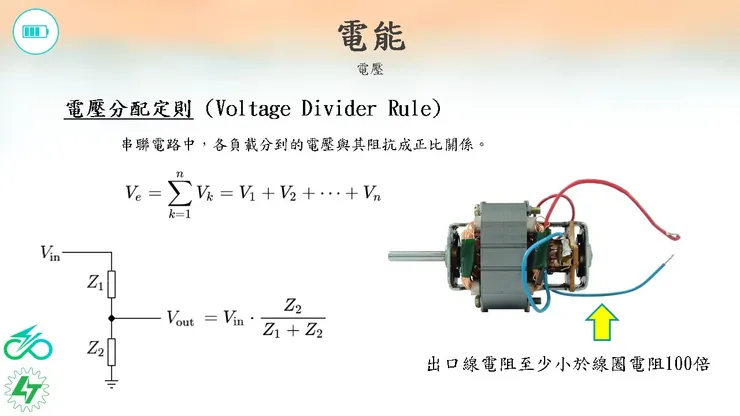
雖然克希荷夫使得我們擁有了調整及分配的權力,但也要注意自身的權益是否在無形當中消失了,偶爾在個別的馬達產品當中會發生這種意外,設計或是挑選馬達出口線時忽略的電阻值差異,進而導致了分壓的非預期現象產生,使得過多的跨壓落在出口線的電阻上,真正需要電壓工作的馬達反而意外的壓降了,最終將導致馬達輸出性能下降的異常。例如一個12V的直流馬達,因為電阻所造成的分壓沒注意到,讓馬達上的真實跨壓僅為10V,這代表著馬達的工作轉速將會下降,僅剩原本的83%。
然而分壓是必然發生的現象,除非其他元件皆沒有電阻值,故需要注意是相對的比例關係,若馬達本身的電阻值超大,則出口線的挑選就較為隨意;反之,當馬達本身內阻低的時候,無論是出口線或是串聯的其他元件,都需要注意其電阻值大小,依筆者的個人經驗而言,需要小於100倍的差異量,才是較為穩妥的安全比例,造成的馬達特性影響將小於1%以內。
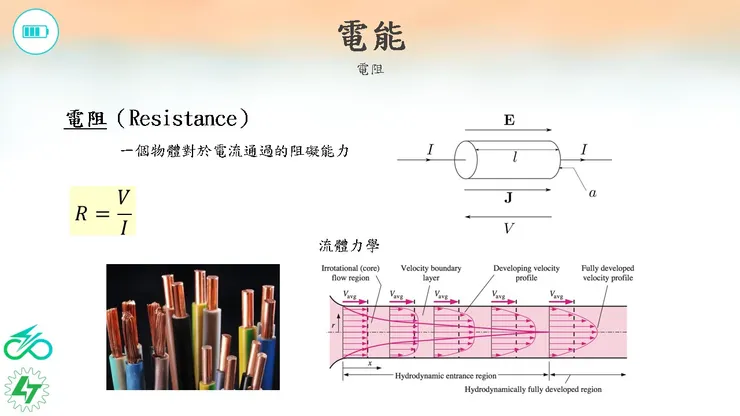
討論過電壓及電流後可以發現,歐姆定律展示了電壓與電流之間還有一個很重要的關係式,那就是"電阻"。電阻這名稱取得相當好,"阻"就代表阻礙、阻力,是造成電流值變小的主因,這情況也與流體的現象一致。當我們使用小水管接水時,獲得的水流量就會受限變小,倘若更換為大水管就可以得到更大的流量,而這當中的奧妙在流體力學是有告知原因;由於水管內的管壁是不移動的物體,會導致流體的移動速度在越貼近管壁時就越慢,反之越遠離管壁就能跑得越快;若將水管的管壁視為流體的阻礙結構,就代表小水管的阻力大,而大水管的阻力小,就與電阻值的情況毫無二致,差別在於電阻能直接地告知阻礙量的大小值,而水管則沒有明確的數值來表示,而是依靠經驗與直覺的判斷,當水管越粗時則流量越大。
電阻其實無處不在,由於電阻的廣義解釋僅是在描述阻礙電流的能力,所以空氣、人、塑膠等一切物質都存在屬於自己的電阻值;從另一層面來看,電阻就是一種限流器,是個用來限制電能亂跑的實用工具,例如避雷針的設計,就是刻意製造一個電阻值相對低的引誘結構,當周遭的其他物體所含的電阻值都高於避雷針時,閃電就會走避雷針那條最小電阻的路徑,達到安全保護其他物體的效果。透過巧妙的安排設計電阻,就能有效的管理電能的運用,包括路徑、速度、流量及安全等等,是電子產業的重要基石。馬達當中亦有部份情況,會利用電阻值來達到抑制輸入電流過大的效果,藉此保護馬達或是降低電力負載。
然而所有事情都是一體兩面的,對於需要高速反應的電子產品,就期望路徑電阻越小越好,最好無限逼近於零,方可達到最極速的電訊號傳遞效果,此時電阻就是個純粹的滯礙。而馬達的情況也極為類似,電阻大多時間僅是作為阻礙與損耗的存在,會限制馬達進入的電流大小,就意味著電阻遏止了馬達轉矩輸出的極限;這也是如今馬達內部的漆包線徑往往越用越粗的理由,採用了較粗的漆包線就能快速降低馬達內阻,使得進入馬達的電流上限增加,即便是維持同樣的電流用量,較低的電阻值也能有效降低導通銅損數值,使得馬達能量轉換效率增加,上述因素都進而導致了,如何有效降低電阻?為馬達研究的重要發展議題之一,甚至有了超導馬達的存在。
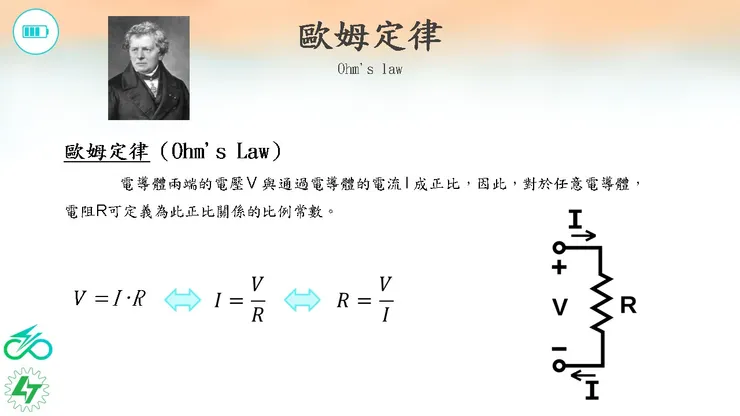
由上述的電壓、電流及電阻的介紹,可以明顯發現,即便電壓、電流及電阻有其各自的嚴謹定義與數學表示式,但絕大部分的時候都是採用歐姆定律來使用,僅是進行的數學式的轉移變換,將所需的數值單獨置於等式的一側而已,如上所示。
這就代表著歐姆定律其實完美地詮釋了電壓、電流及電阻之間的關係變化,無論是電壓等於電阻與電流的乘積,或是電壓除以電阻就可以獲得電流,以及電壓除以電流就是電阻值,都可任意切換使用,也都正確地符合真實物理定律;由於歐姆定律非常實用,幾乎成為了電力電子學的起步基礎,是個您可能不知道歐姆定律的名稱,但又必定會使用到它的法則。
然而,光靠一個電阻其實無法完美的詮釋電流反映,就如容我們形容水流時,還可以細分為流量及流速兩種型態;細水管若在源頭加壓迫使流速增加,也能運輸較大的流量,而使用粗水管即便水看起來緩慢流動,但運載的水流量仍然十分龐大。而電感就是用來解釋電流速度變化的參考數值,因此可以簡單的認知,當一電子元件的電感值越大時,電流進去的速度就越慢,代表電子訊號的傳遞速度較慢,反之電感小,則電流響應快,訊號傳遞也快。
由於傳統的電感元件皆是使用漆包線纏繞於導磁材料上,看起來很像水管收納時捲成一圈圈的型態,因此也可假想漆包線圈就如同水管的長短,當其過長時就會捲曲收納,形成一圈圈的樣子。而原本短短的水管,僅需要將水龍頭扭開,水就會立即從水管末端流出;但若接上了一截增長的水管之後,勢必需要等待一段時間,才能看到水流出來,對使用者而言就類似水流變慢了的表現;這種情況就如同電路當中加入了電感,就會讓電流的移動延遲了的效果。
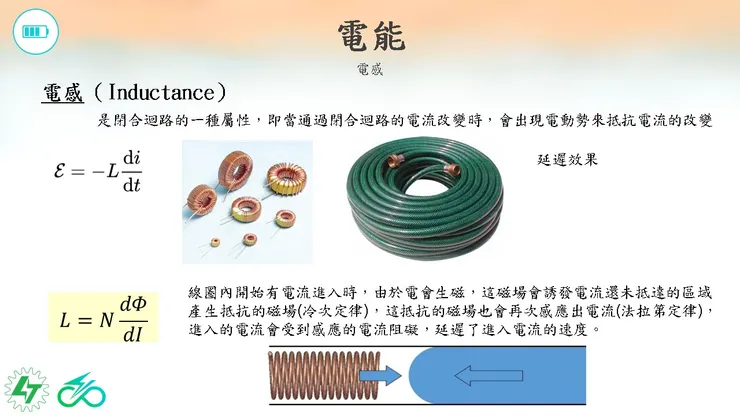
至於電感產生的原因,從電磁學的觀點來看,就是電生磁、磁生電的交互作用影響。每當有電流經過導電體時,周遭會進而生成感應磁場,而感應磁場又會誘發生成另一組反映電場,這形成的新電場則會於導體內部產生新的反映電流;但不幸的是,生成反映的電流方向恰巧與輸入電流的方向相反,就類似兩台火車對撞的感覺,只是輸入電流較為強大,而反映生成的電流則較為微弱,僅能稍微阻礙輸入電流前進的速度,但無法完全抵銷輸入電流,這一來一往就造成輸入電流延遲的效果。
但對於機械力學的觀點來說,這不否也是一種位能的表現,原先導體內並沒有電流,是個已然穩定的情況,有其自身具備的位能狀態;當開始有輸入電流開始進入,導致內部能量型態要產生變化時,原先的位能狀態會主動抗拒阻礙,此種現象在力學當中稱之為"能障",需要後續輸入改變的能量大於此能障限制,才能造成狀態的改變。
藉由上述的說明,可以了解電感是個用來評估電流反應作用的一項參考數值,而科學家們也努力地將電感關係式找出來,如同下列的電感方程式,其中電感L的值是來自於導體迴圈數N,乘上了一個磁場迴路內的磁通量Φ相對於電流i的瞬間變化量。
然而這死硬的公式描述法,顯然難以體會電感到底是甚麼?由公式當中可以肯定電感與導體匝數N、磁通量Φ以及電流i有關係,僅此而已。此時改用口語化的說明如下,當您擁有一個可以導電的物質,每當通電將電流流經導電物時,由於電流本身會誘發磁場,使得周遭生成了一組感應磁場,且這個磁場的強度會與電流的瞬間變化量有關係;同時還發現磁場的強度也與導電體的組成形狀有關,當導電體是捲繞成圓形迴圈時,會使感應磁場的強度倍增,而這些關聯性的總和值就是電感。
透過較為口語化的描述可以發現,電感表示的大多是磁場的變化作用,而非是電能下的電流直接變化量,即便在數學公式當中有個位在分母的電流微分項,但也僅是表明這一切是在電流有變化的瞬間(di)所產生的磁場變化;主要是因為當電流沒有變化時,導電體上並不會生成對應的磁場,因為此時此刻的位能狀態是穩定的,直到電流有變化時,才會生成需要抵抗改變狀態的能障。
故可知電感的方程式僅是告知我們,電感是在描述導電體上的瞬間磁場變化量,並非是電能狀態的情況,但明明電感又是電能應用中的重要基礎,顯得有些詭異。主要還是受到電生磁、磁生電與位能的交互關係影響,對筆者而言又可稱為一種"能障"行為的實際表現。一個原本無磁場變化的區域,其能量狀態是平衡且穩定的,此時我們輸入了電流經過此區域,因此產生了此電流變化的感應磁場,此舉動會使得原本平衡狀態會進行抵抗改變,會自然生成一組反向的磁場去抗拒,而這反向的誘發磁場同樣進一步產生反向的電流去抵制我們外加的電流,使得輸入電流產生延遲的效果,因此我們將這抑制輸入電流的反應能力稱之為電感。因此電感雖然大多用於電能領域當中,但其實際作用是涵蓋了電磁場的範疇。
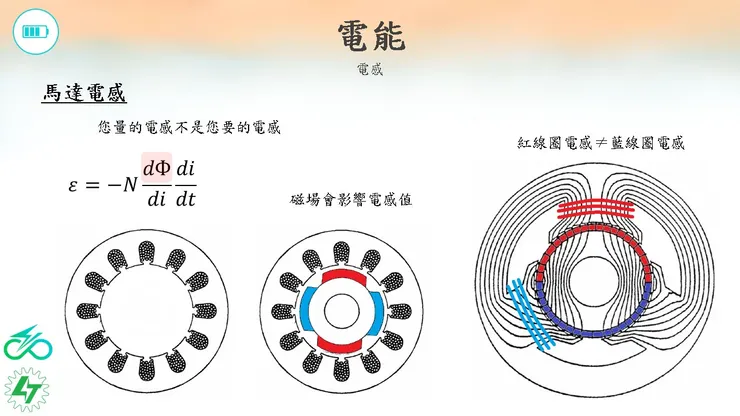
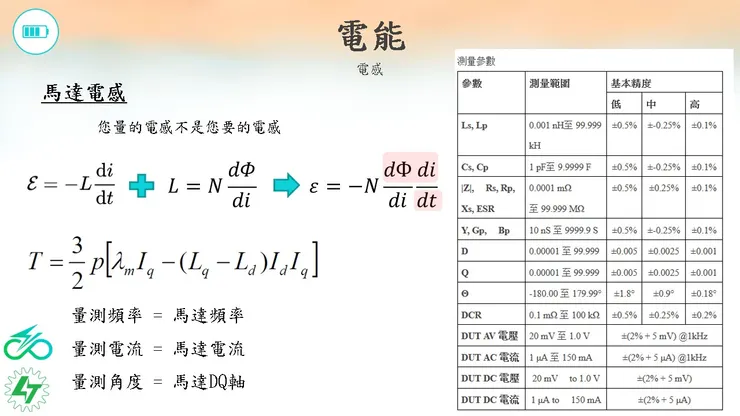
至此可知電感不光是用來描述電流延遲反應的作用,還與磁場有直接關聯性,因此一旦將電感這項參數導入馬達領域當中,複雜的程度往往會急速升級;原本僅是在討論瞬間電流進入導電體後的磁場反應作用,但由於馬達內部除了線圈電流的變化問題之外,矽鋼片具備的磁場快速轉換的能力將會大幅加劇磁場變化程度,包括線圈是否正對矽鋼片的槽極配位置,都會直接影響電感值的大小變化,而當馬達內部還有個永久磁鐵時,一但馬達轉速越快,就代表內部磁場的變化頻率也越快,也將導致線圈上的電感量變化。
過往每當有人詢問筆者,馬達電感量測問題時,筆者則會優先反問關於馬達轉速、槽極配或是馬達內部磁場的變換頻率此類馬達相關的問題,可惜的是會詢問馬達電感的往往是電控人員而非馬達設計人員,因此這一切的資訊是不清楚的,僅是希望使用電感計量測到的電感數值拿來使用。但他們將會痛苦的發現,每次量測的電感值以及每相線圈的電感量都不盡相同,這就是很單純的犯了矽鋼片位置不穩定的虧,實際上將馬達轉子緩動的轉,就會發現馬達線圈電感會隨著轉子角度的變化而改變,是具有一個最大值與最小值的波動曲線,這就是受到槽極配的矽鋼片對位的影響;其次則是好不容易判定一個電感值參數,但使用的成果往往不如預期,就是犯了馬達轉速頻率的干擾,也就是馬達在不同轉速甚至是不同負載的情況下,電感量都不盡相同,因為磁通量Φ以及電流i值都會直接受到馬達轉速及轉矩變化而改變。
所幸絕大部分的馬達應用場合,僅需要馬達穩定的轉速及轉矩狀態輸出,而電感也會因為運轉在狀態穩定的情況下而消失,所以對電感參數預測的不準確,在大部分的運用中影響並不大,僅有部份馬達需要在意精準的加減速能力條件下,電感就會變成重要的變因參數;而實際的執行層面上來說,電感參數也並非是量出來的,而是反覆測試實驗出來的結果。
由上述可知,馬達電感的量測值,對筆者而言,並非是馬達運用的實際參數,大多僅是在檢測馬達繞線品質穩定的一項參考要素,無法有效的直接運用在馬達控制當中。
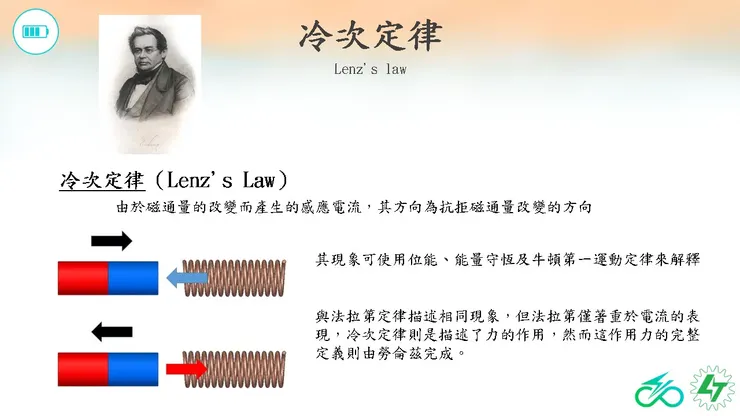
在介紹電感時有提到能障與位能的觀念,就是原本此區域的穩定狀態,受到外擾的電流或是磁場作用時,會誘發生成反抗的磁場與電流反應;這種現象被"冷次"給觀察到了,並將其命名為"冷次定律",但冷次僅觀測了使用外部磁場的變化,會使得導體線圈內的感應電流發生相對應的變化。
假設將磁鐵的N極急速地靠近導電線圈,此時導電線圈上會產生同樣的N極磁場,想要把磁鐵推離,維持雙方前一刻的穩定狀態;也由於導電線圈上誘發了N極磁場,所以內部也產生了電流,且是一個對應N極磁場的電流方向。
反之將N極迅速的拉離導電線圈時,導電線圈處會感應生成S極磁場,想要拉回磁鐵使雙方維持在前一刻的固定距離,因此導電線圈上會有一組對應S極方向的感應電流。
因此冷次確認了磁生電一事,而且還明確的指出感應生成的電流是會對應生成磁場的需求,而有了不同的電流方向。
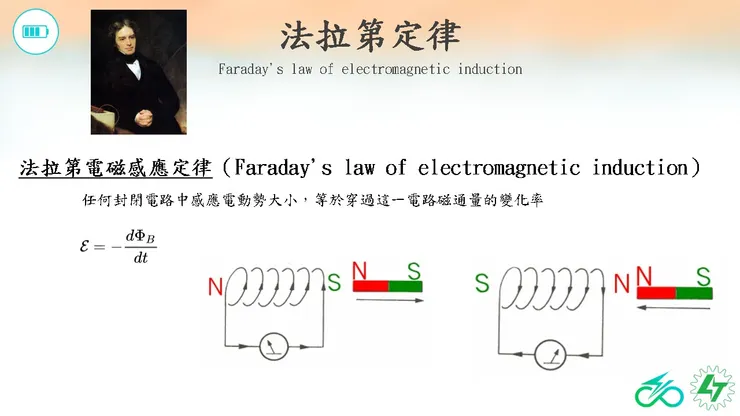
不過同樣的電磁現象,"法拉第"也同樣發現了,但法拉第則是更著重於以電能的整體表現來描述;由於導體線圈上有電阻值,而感應生成的電流除了有方向性之外也有大小值的變化,並搭配上歐姆定率的使用,讓電阻值乘上了電流值就是電壓值的觀念,因此法拉第使用了電動勢(電壓)來定義了磁通量的變化大小,並提出了數學表示式,使整體的實用性與完整度更高,相較於冷次則僅是定義了電流方向,功勞顯得較微小;也因此法拉第往往較常被提到,而冷次就相對冷門。
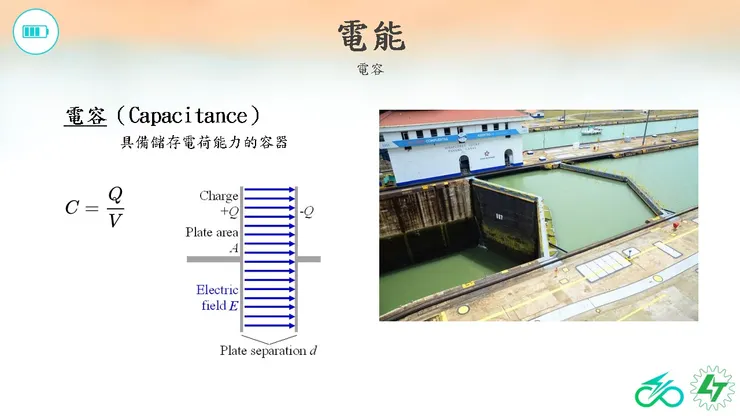
但電能領域當中,還有另外一項重要的基礎"電容",這名稱筆者也認為取得相當生動,就是容量的意思,一個能儲存電能的裝置,這樣的感覺。若以流體來比對的話,就像杯子與水庫一般,是個能提高水位的裝置,但還是會受限於容量大小而有所差異,若將其倒出,杯子容量小,水流小,且水位也降得快,而水庫則容量大,放水的流量也大,且水位降低也緩慢不明顯;這一切也都是電容在執行的工作,包括提高水位,釋放電流等等,完全可以對等比擬。
因此當我們需要龐大的電能時,可以藉由電容先儲存起來,等到要使用時再一次性的釋放,就能獲得較大的電壓、電流及電能可以使用;但需要提醒注意的是,這種狀態是有限的,一旦釋放完畢就需要重新花時間儲存方可使用。由此可知電容是個儲存電能的裝置,主要影響的是電能部分;然而馬達本體所具備的寄生電容並不大,相對容易卸除,但在某些情況下,會遇到馬達還有殘存電能的情況,其實大部分的殘存電能來源並非是電容,而是馬達本體的轉動慣量之影響,屬於動能的儲存方式。因此若希望馬達快速剎車,達到停止運轉抑制動能的作用,不妨嘗試將馬達的出口線短路或是外接洩能電阻,將會造成電能快速轉移消散的效果,就能使得馬達慣量所儲存的動能藉由此條電能路徑傳遞外移,進而獲得馬達急停剎車的表現。
除了上述的使用狀態之外,電容另一個方便的用途,就是穩定下游的輸出狀態;有時會受限於某些現實影響,導致上游的電能供應不穩定,會有高低電位的變化落差,因此先將其穩定儲存至電容內,後續就可以獲得相對穩定的電能狀態。這種使用方式就真的是如同水庫的作用了,雨季時收集儲存水資源,等到旱季時再拿出來使用。
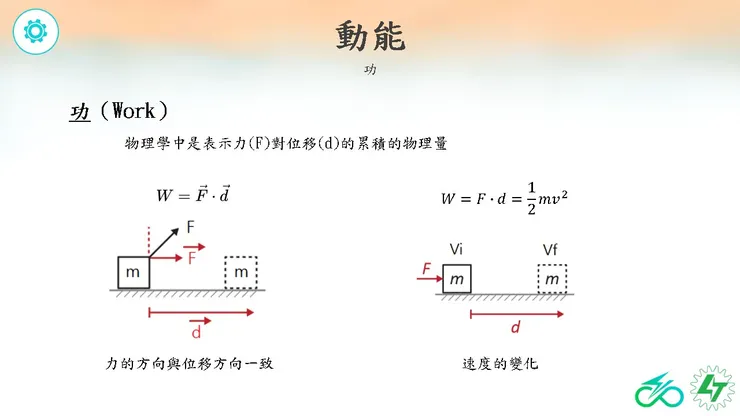
馬達終究是作為動能輸出的轉換機構,勢必需要探討輸出動能的部份。實際上,無論是動能或是電能的角度,都有共同使用"功"這個單位來描述使用的能量,但由於領域及定義的不同會有其差異性;電能內的"功"定義上相對簡單,就是電壓乘上電流,但動能中的功就相對具有多種形態。一開始僅是針對一個物體移動來定義,簡單的描述就是力量於距離,相當於一個人抱著石頭走動,最後將石頭放下,這段時間所出的力氣跟移動的距離,就是"功"。然而後續隨著科技的進步,有了各種交通工具後,逐漸發現進行速度變化時,也會需要"功"的加入;例如慢跑時,人可以感覺到勞累,也可以將此視為一種"功",但若要加速快跑時,會發覺更累,需要出的腳力更多,因此開始將速度也列為一種參考要素。
至於兩種型態時期並不衝突,畢竟日常生活都會遇到,很容易理解。當我們從台北開車到高雄時,所使用的油就是"功"的直接表現形態,因此肯定知道要花油錢也就是"功"才能達到位置移動的成果;但若想要快點抵達,也就是加快開車速度,那生活經驗也已然證明,勢必得要花更多的油錢,代表使用更多的"功",才能達增加車速的效果。
由上述的生活實例可知,其實動能的表現,就是人們的實際體驗,僅是採用了數學描述的方式展現與呈列;若對於數學與書籍上的說明感到陌生時,不妨想想各種生活經驗,就能快速對應理解。
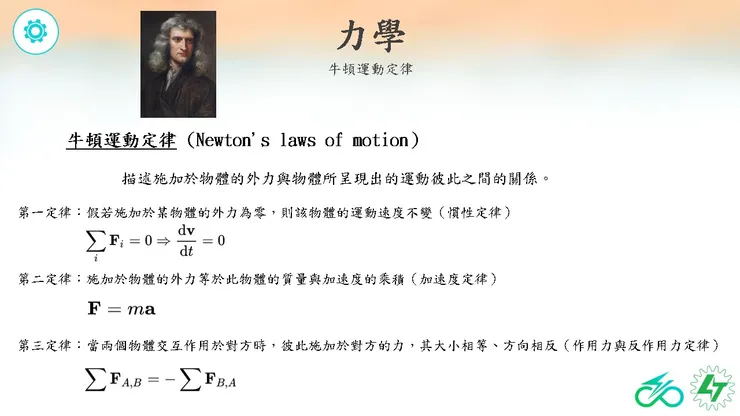
而這些動能的表現,在機械領域中會被稱為力學,那就離不開"牛頓"這大師所發現的三大定律,因此只要觀察到會動的行為時,都可以參考"牛頓運動定律"。
其實較為尷尬的是第一運動定律,這是實務上很難體會的感受,但這也是位能的基本概念,一個物體當下的狀態會持續地維持,直到有外部力量的干擾。我們若是以靜止不動的物體來體會此定律,這件事會變得非常合理,如同放在桌上的水杯,其當下的運動速度為零的狀態,沒有人去拿,它肯定不會移動,就沒有速度的變化;但若是以正在移動的物體來看,就顯得十分難以理解,丟出去的棒球,並不會持續維持它的速度,而是會逐漸減速直到最後掉落,看起來就與第一定律相違背。然而牛頓並沒有錯誤,移動的物體其實是受到了風阻以及重力等等的外力影響,才導致運動速度及方向的改變;因此在面對第一定律時,往往需要注意一些沒預料到的外力影響,才不會導致觀察上的錯誤。
第二定律則是第一定律的延伸,但有趣的是此刻用的並非是位移的量,也並非使用速度來定義,而是進一步使用了加速度;而加速度的本質,也僅是在描述物體在外力影響前與外力影響後的速度之間的差異。由之前的"功"定律可以發現,一開始採用的是移動距離,也就是位移量作為動能"功"的計算描述,隨著知識技術的進步,開始納入了速度這項參數來進行評估,直到牛頓更進一步定義了速度的變化量,也就是加速度;由此開始我們發現原來只有在加速度要有變化時,才需要額外加入"力"。最實際的體驗例子就是開車,其實高速巡航時,耗油並不兇;但在市區走走停停時,反而比行駛高速公路時更為費油,這就是受到加減速度需要進行變化時,就需要額外付出更多的"功"來使用,因此顯得更為耗能。
第三定律則是作用力等於反作用力,這部分在馬達當中比較少顯現,不太會進行討論,但也是真實存在的現象,需要去避免以及解決這預期之外的力作用。馬達領域中實際可觀察到的案例就是馬達定子的漆包線圈往往會使用凡立水固定住,但明明馬達上所生成的作用力都經過機構設計,將力展現於轉子轉動上,定子線圈應當是不直接承受力的作用,然而這就是一種反作用力的影響,使得線圈上產生細部的抖動,因此利用凡立水的粘著固定力,將漆包線圈緊緊的固定,避免受到長期的磨損導致絕緣層破裂,引起馬達短路故障。
以上這三大定律,針對的是所有會動的物體,因此也涵蓋馬達的領域,即便馬達大多做的是旋轉運動,但基本的力學規則仍然是符合的,僅是展示的形式不同,有時會不容易直觀地察覺而已。
除此之外我們還需要注意,若在力學的討論當中往往是以線性運動為主,然而馬達則是原地的旋轉的運動形式居多,兩者類似但也不盡相通,這當中會需要進行一些單位的轉換以及重新定義。
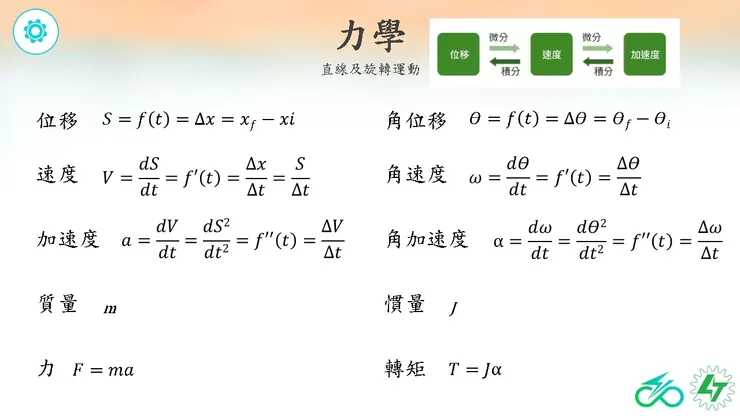
最基本的位移距離,在線性運動中可以直接採用長度單位來使用,例如跑了一公里或是幾公尺,顯得容易理解。但馬達則是旋轉物體,較為容易認知的單位是RPM,代表每分鐘跑了幾圈,例如60RPM就是在1分鐘就跑了60圈,也就代表一秒跑一圈的意思;此外也常常以角度作為旋轉運動的單位基礎,畢竟旋轉就代表著角度的變化,因此位移距離就可以對比為旋轉角度,故有人藉此命名為角位移,方便較為直觀的理解。
當我們將位移對照為旋轉角度之後,那後續對比速度與加速度的定義就更為簡單了,畢竟速度就是對位移量進行時間微分,再次對速度再次進行時間的微分處理就是加速度;同理對角位移進行時間微分處理,就會變成了角速度以及角加速度。另外要提醒,微分並不是甚麼艱難的數學概念,而是在觀察變化的一種方式;當僅行百米賽跑時,選手花了10秒抵達終點,對位移而言是這個人移動了100公尺,但對速度來說,則是這個人總過花了10秒移動了100公尺,代表他的速度為每秒10公尺,此案例當中將移動距離導入了時間觀念,就是一種對時間微分的做法。只是大多數的微分是在觀察更細微而短暫的變化,觀察的量可能不是10秒,而是1秒甚至0.1秒;這也代表微分是一種把總量切分得更細微的觀測機制,而且還能更換不同的觀察參數,但這一切終究也僅是為了描述一些真實現象,並不需要過度恐懼。
此外,直線物體中的質量,對照在旋轉物體當中會以慣量取代,而力則變為轉矩,但亦有人稱之為力矩,這些都是因為運動形式不同所進行的改變;且這些質量以及力的作用模式會有所變動,並產生的新定義與名詞。直線運動與旋轉運動兩者看起來十分類似,包括對應的數學方程式用法都相同,但本質上還是有差異,建議有空可以花些時間重新理解;最大的差別僅在旋轉運動會多了個距離的參數,也就是旋轉物體的直徑位置,無論是慣量或是轉矩,都需要加入與圓心距離的關係項。
上述講解了馬達輸入的電能以及輸出動能的部分,而實際上馬達內部還有一個磁能的作用反應,這部分可以說是最複雜,但也可以最簡化的部分;畢竟磁鐵同極相斥、異極相吸的遊戲從小玩到大,而且磁鐵越大顆磁力也就越強,這些都是很容易體驗到的生活經驗,不太需要額外學習。而磁學難的是將磁力強弱數值精準地計算出來,而非了解馬達內部的磁力作用規則,因為這些使用方式都有親身嘗試過;可以試想一下兩塊磁鐵,其中一塊掌控在自己手上,於不接觸的情況下想要控制另一塊磁鐵移動時,有兩個選擇,一是利用磁吸力在前方拉扯磁鐵移動,第二種方式則是利用排斥力在後方推動磁鐵前進移動,都能達到不接觸的移動效果。
馬達的旋轉其實也是遵循同樣的原則,在想要移動旋轉的方向上,在於前方角度位置產生吸力,後方角度位置產生推斥力,就能影響到轉子上的磁鐵受力作動,進而帶動整個轉子旋轉。與小時候的遊戲的最大差別是,過往是直接使用兩塊磁鐵來遊玩,但在馬達當中為了讓磁力可以更為輕鬆地控制與變化,改採用了線圈所生成的電磁鐵;如此一來可以藉由變動線圈上電流的方向與大小,來變化線圈電磁鐵的N極或S極性以及電磁鐵的磁力強弱,以達到吸或拉的磁力強弱作用,進而調整馬達轉向以及轉速。
其中還有些許細節需要注意,但也都是小時候體驗過的;當使用吸力來引誘另一塊磁鐵時,距離得要掌握好,不然太過靠近會導致磁鐵瞬間吸在一起,若此情況發生在馬達當中,就是急停急煞的狀況,十分危險;而當使用排斥力時,不會有磁鐵吸在一起的撞擊力量,但實際上操作時對於方向的控制並不容易,經常往非預期的方向移動。諸如此類的磁力操控應用上,仍然有許多的細枝末節需要注意,在馬達領域上更是如此,沒處理好會有事倍功半或是各類異常的情況產生。
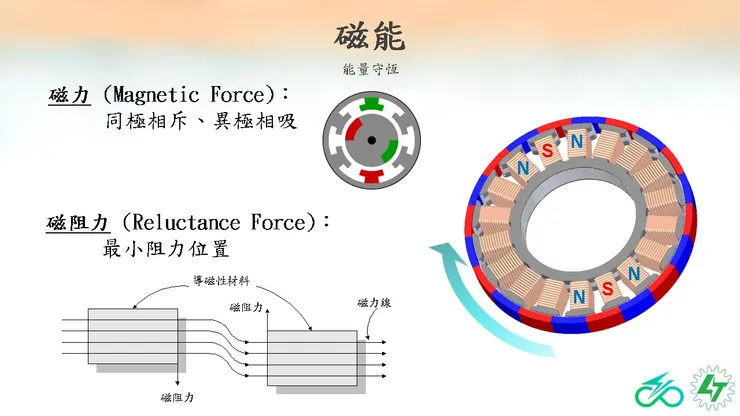
還有一點較為容易忽略,但實際上也肯定經歷過的現實,就是並非是磁鐵與磁鐵之間才會產生吸力作用,很多種的導磁材料都可以被磁鐵吸住,因此有部分馬達並沒直接使用磁鐵,而是採用了導磁材料就能使得馬達運轉。而這種導磁材料上的磁吸力,被稱為磁阻力,也是馬達內部中的一種力量型態;然磁阻力相較於磁鐵上的磁力而言較為弱小,因此容易被人們所忽視。
純粹使用導磁材料的馬達分別有磁阻馬達、感應馬達、磁滯馬達以及步進馬達等等,但可想而知,其力量的表現會較為遜色,往往需要較大的體積空間才能達到永磁馬達的同等規格,故在有體積空間或是重量限制的使用條件下,其競爭優勢會遠不及永磁馬達。然而僅使用導磁材料的馬達仍然具備其獨特的優勢與市場,包括高速、嚴苛溫度環境及價格等因素,都是此類馬達的天下;畢竟在馬達的世界當中,其實並沒有最好的馬達,有的往往只是最適合的馬達。
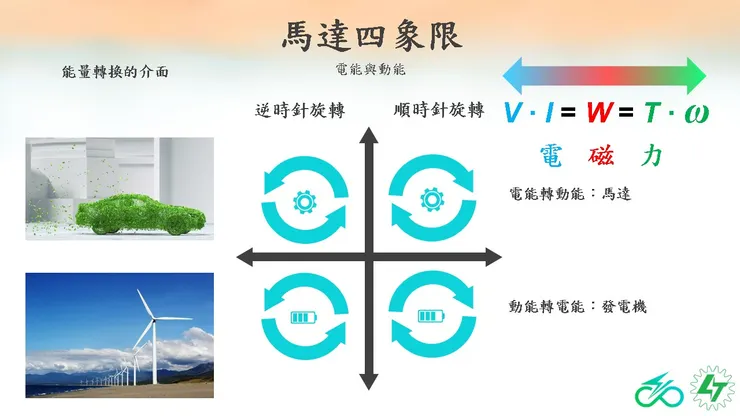
另外還需要告知一下,馬達與發電機其實是一體兩面的存在,學術一點的說詞是馬達具備四象限的功能性,包括馬達可以順時針旋轉或是逆時針轉動,這兩個象限比較容易理解,因此電動機車可以向後走,其實只是馬達的基本功能而已。而傳統上的認知,輸入電能得到動能輸出就被定義為馬達;更改輸入與輸出之間的關係,改為動能輸入電能輸出時,就會稱為發電機,但實際上馬達與發電機都是採用相同的結構以及能量群,僅是輸入與輸出的關係對調而已。
但上述僅是從能量及結構觀點來看,經過細心設計出來的馬達作為發電機使用時,往往發電的效率並不高,主要是設計當下會針對專屬應用做一些優化處理,也就導致做為另一角色使用時,並未操作在最佳效率點上,就會變成只有一好沒有倆好的情況。雖然在設計上可以取平衡,讓其作為馬達與發電機都可兼用,但就是各自50分的概念;若能針對馬達或是發電機的單一狀態設計時,就會變成90分與10分的差異。這結果在汽車工藝當中就是最實際的例子,具備修車經驗的朋友就會知道汽車內有啟動馬達也同時具備發電機,它們都是串聯引擎來使用,但卻分為兩個獨立的個體;除了商人想要賺錢的因素之外,就是因為各自任務不同,其運用狀態也不盡相同的限制條件,混合使用反而並不恰當,才進行獨立設計的實際結果。
想當然耳,在某些極端的情況下,如空間或是重量有限,亦或是另一功能屬於額外的收益,並不指望其效能表現的條件下,可以將發電與馬達進行兩象限的混合使用。
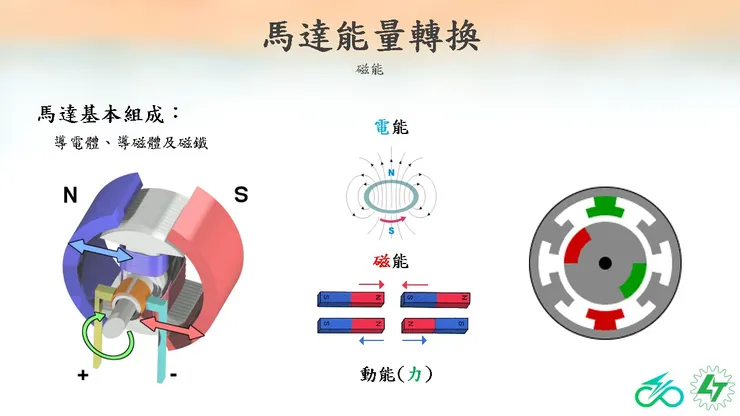
雖然內容講了比較多,但如何建立好完整性的概念,其實對於馬達的學習是更為重要的。馬達的功能也不需要過度神話,其實就是一個能量轉換的裝置,如同傳統的風車機構一樣,風車係將風能轉換為動能使用的設施,而馬達是將電能轉換為動能使用的裝置。
馬達內部其實就是三種能量形式在進行轉換與傳遞,包括了電能、磁能及動能三部分,只需要詳細理解這三種能量的相關法則,就能進一步的透視馬達。
===================================================
萬丈高樓平地起,國外的學習經驗告訴我,基礎才是重點,大家共勉勵。
#可擔任業界顧問、講師
#個人經營歡迎贊助
馬達技術傳承計畫
想要馬達的技術嗎?想要的話可以全部給你,去找吧!
我把所有的知識都放在那裡了。