這篇文章筆者也是十分意外,本來以為這已經是習知技術,不需要深究;但近期詢問的次數又增多了,故撰寫以進行介紹;本文先以霍爾感測器(Hall Sensor)的安裝說明為主。
霍爾感測器(Hall Sensor)其實應該算是Hall IC了,因其已經完全數位模組化,但習慣仍統稱為Hall Sensor,而其主要功能就是針對磁極變化產生相對應的電位訊號輸出;白話一點的說法,就是感應到N極磁場時,輸出5V的電壓,也就是數位化二進制當中的1,而當遇到S極的磁場,就變成0V的電壓狀態,代表數位化中的0。當Hall Sensor安裝於馬達當中時,就能藉由電壓位準的變化,來判斷當下馬達內部磁場的狀態;也就是無刷馬達的永磁轉子旋轉時,當下的角度資訊判斷。永磁無刷馬達可以簡單理解為是藉由永久磁鐵搭配線圈電磁鐵的結構,當N極永久磁鐵靠近線圈時,就送電在線圈電磁鐵處產生S極,便會將永久磁鐵吸過來,進而產生一股旋轉動力,如下圖所示;因此確認當下永久磁鐵的位置資訊就變得極其重要,Hall Sensor就是協助馬達驅動器獲取永磁轉子位置資訊的感測器。
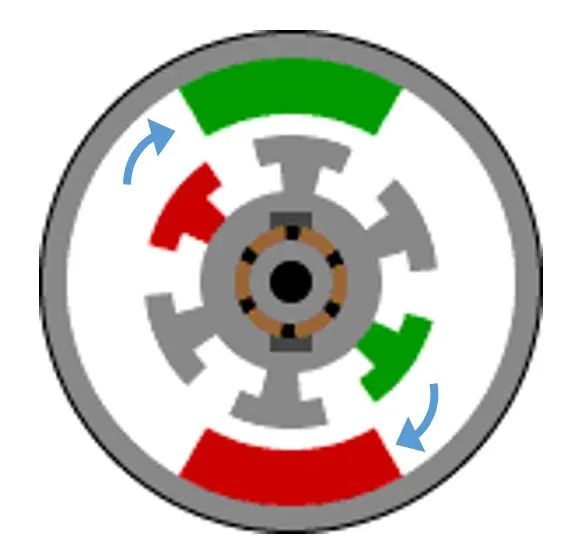
磁吸力導致馬達旋轉
由上述所知Hall Senso主要是針對的是馬達轉子上的永久磁鐵進行監視感測,因此安裝的位置也要完全配合永久磁鐵才行。當我們把轉子上的磁鐵N極與S極視為一個完整的圓,則Hall Sensor的基本擺放原則就是將圓均勻等分,如下圖當中,NS極作為360度的圓,則3顆Hall Sensor就是採用相差120度的放置;也就是放在0度、120度及240度的位置上,就會達到均分360度的結果。最基本的擺放概念就是,無論想要放幾顆Hall Sensor,目標就是均分NS極。之所以市面上都是採用3顆Hall Sensor,而非更多顆,主要是因為馬達常採用的三相電磁線圈會有六種變化,如下圖右側所示;若僅使用2顆Hall Sensor只能回授4種狀態變化資訊,而使用3顆最多有8種訊號狀態的可能性,但因為上述的均分擺放方式,導致有兩種狀態永遠不可能產生,因此剛好就是6種訊號,直接對應到了電磁線圈的變化,是為最理想的選擇。
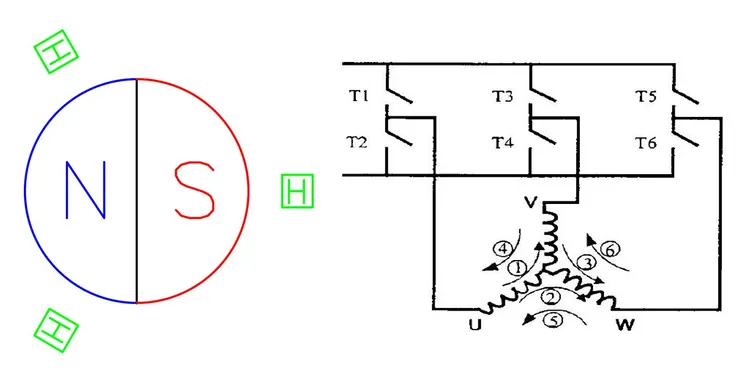
三相馬達的線圈電磁鐵有六種變化
實務上Hall Sensor的擺放可能性,會隨著馬達永久磁鐵的數量增加,而有所變化;但均分NS極的角度原理並沒有改變,這就衍生出一種新名詞"電器角",用來區分一般所認知的機械角差異。也就是從機械角來看的擺放方式會很多樣,但對NS磁極而言的電器角其實仍然只有一種;如下圖在傳統的機械角認知上,會有兩種擺放方式可以做選擇,但對Hall Sensor而言,仍然是看到一個N極與兩個S極的結果,代表對應的NS磁電器角狀態仍然是相同的。
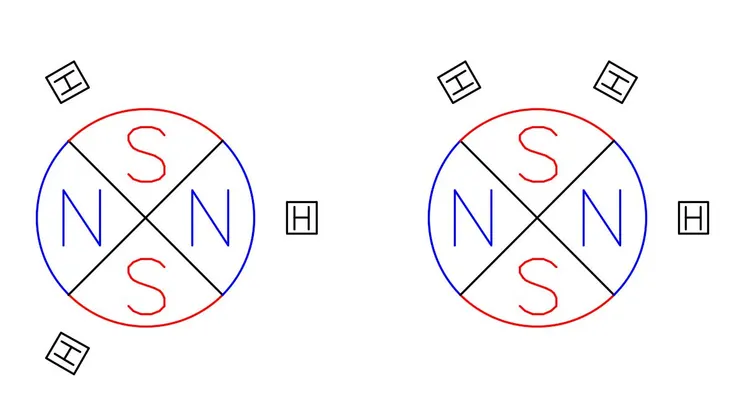
Hall Sensor擺放方式
藉由上述的說明,可以有個簡單的認知,磁極的數量越多時,Hall Sensor擺放的選擇就會越多,但總歸不能脫離均分的原則。當結構上限制了Hall Sensor的位置時,其實是可以跳個角度擺放的,並不影響馬達運轉。甚至具了備程式編輯能力,一旦遇到無法採用均分擺放時,可以利用3顆Hall Sensor具有8種訊號的可能性,來驅動馬達運轉;但筆者並不建議採用,主要是還卡了一個旋轉力道會不均勻的缺點,會產生額外的震動噪音,需要額外花心思去處理。
重點整理:
要先掌握原則,才能享有自由度。
#可擔任業界顧問、講師
#個人經營歡迎贊助
馬達技術傳承計畫
想要馬達的技術嗎?想要的話可以全部給你,去找吧!
我把所有的知識都放在那裡了。


















