這一節要模擬的是擺(pendulum)這個裝置中,構造最簡單、具有理想化性質的單擺(simple pendulum)。
單擺是由一條下端連接著一個擺錘(bob),上端懸掛在固定的樞軸(pivot)上的擺臂(arm)組合而成,如圖。當單擺靜止時,擺角,也就是擺臂和鉛垂線之間的夾角,大小會是0;當把把靜止的擺錘往旁邊拉高並放開之後,因為重力及擺臂所提供的張力(tension)的作用,它就會依循著一條弧線來回擺動。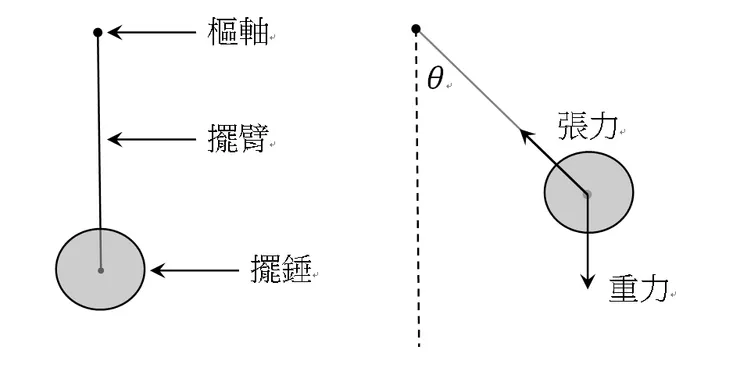
在真實世界中,單擺的運動是在3D空間中進行的,但是,因為我們的模擬世界是個2D的世界,所以我們就只考慮在2D空間中的單擺。
因為單擺是懸掛在樞軸上,所以擺錘在受到重力的作用時,並不會直接掉到地上,而會在重力及擺臂所提供的張力共同作用下,來回擺動。這時候,如果想要模擬擺錘的運動,就不能單純的只考慮重力而已,而必須同時考慮擺角的大小,藉此算出擺錘的角加速度以及角速度來進行模擬。
要算出擺錘的角加速度其實不難,簡單的幾何作圖以及三角函數,還有牛頓第二運動定律,就可以辦到。
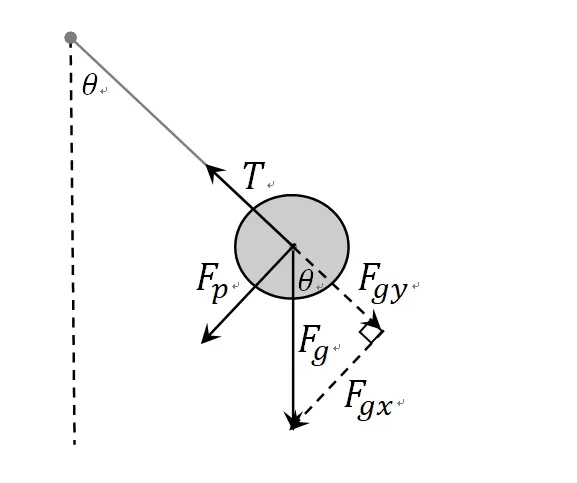
參考上圖。作用於擺錘的重力Fg,可以被分解為Fgx及Fgy兩個互相垂直的分量。Fgy跟擺臂提供的張力T,大小相等但方向相反,所以擺錘在運動時,才沒有往外飛出去或向樞軸的方向飛過去;Fgx垂直於擺臂,是促使擺錘擺動的作用力。因為擺臂跟擺錘的運動方向互相垂直,所以不管是T或Fgy,都不會影響擺錘的運動;會影響擺錘運動的,就是Fgx。
為了容易辨識,我們把Fgx改名叫做Fp;又因為它是作用在擺錘上,所以畫圖的時候,可以把起始點移到擺錘的中心點上,這樣更能呈現出它的作用對象是擺錘。
那要怎麼算出Fp呢?假設擺角是θ,由圖可以知道,Fp的大小會是
Fg sinθ
除了大小之外,也必須知道方向。因為Fp的作用方向,是朝著把擺錘拉回靜止時候的位置的緣故,所以當單擺位於鉛垂線右手邊時,Fp<0;而當單擺位於鉛垂線左手邊時,Fp>0。另外,當單擺位於鉛垂線右手邊時,擺角θ的值是正的,所以sinθ>0;而當單擺位於鉛垂線左手邊時,擺角θ的值是負的,所以sinθ<0。因此,根據這些條件以及已知的Fp大小,我們可以得到
Fp = -Fg sinθ
若擺錘的質量是m、重力加速度是g,則
Fg = mg
所以,最後可以得到
Fp = -mg sinθ
有了Fp之後,就可以用牛頓第二定律來找出擺錘的角加速度了。不過,因為擺錘是繞著樞軸旋轉,所以我們用的是牛頓第二定律在這種情況下相對應的版本:
τ = Iα
其中,τ是力矩(torque),是作用在物體上,使物體繞著轉動軸或支點轉動的物理量;I是轉動慣量(moment of inertia),是衡量讓擺繞著樞軸轉動的困難度的物理量;α則是角加速度。假設擺長,也就是擺臂長度,是r,則τ和I的計算方式為
τ = rFp = -rmg sinθ
I = mr2
所以
α = - g sinθ / r
利用這條式子,只要知道擺長、擺角和重力加速度,就可以算出擺錘的角加速度。值得注意的是,在式子中,並未出現擺錘的質量;也就是說,擺錘的角加速度並不會受到擺錘質量大小的影響。
在寫程式時,雖然在真實世界中,地球上的重力加速度是9.8 m/s2,不過,畢竟我們只是要在模擬世界中呈現出擺錘的運動效果,所以就跟在第二章處理萬有引力常數時一樣,在模擬時,我們並不需要去管真正的重力加速度值是多少,只要任意設定一個看起來效果不錯的數字就可以了。
假設變數gravity裡頭放的,是我們設定的重力加速度值、擺角是angle、arm_length是擺長。利用前面導出的擺錘角加速度計算式,以及先前處理角速度和角加速度的方法,模擬的程式可以寫成:
angular_acceleration = -gravity*math.sin(angle)/arm_length
angular_velocity += angular_acceleration
angle += angular_velocity
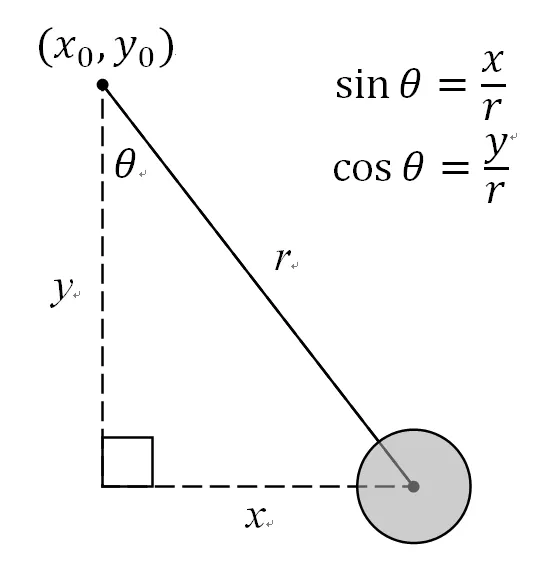
有了擺角之後,因為擺長是已知的,而且樞軸的位置是我們自己選的,所以就可以算出擺錘的位置。假設樞軸的位置在(x0, y0),而擺角和擺長分別是θ和r,從下圖可以很容易就看出來,擺錘的位置會在
(x0 + r sinθ, y0 + r cosθ)
所以,如果pivot=pygame.Vector2(x0, y0)是樞軸位置,計算擺錘位置的程式可以這樣寫
x = arm_length*math.sin(angle)
y = arm_length*math.cos(angle)
bob_position = pivot + pygame.Vector2(x, y)
或者更精簡地寫成
x, y = math.sin(angle), math.cos(angle)
bob_position = pivot + arm_length*pygame.Vector2(x, y)
有了這些之後,就可以設計模擬所需的Pendulum類別了。設計完成的Pendulum類別如下:
class Pendulum:
def __init__(self, x, y, arm_length, angle_deg):
# 取得顯示畫面
self.screen = pygame.display.get_surface()
# 樞軸位置,由傳入的x、y數值決定
self.pivot = pygame.Vector2(x, y)
# 擺長、擺角
self.arm_length = arm_length
self.angle_rad = math.radians(angle_deg)
# 擺錘的初始角加速度及初始角速度
self.angular_acceleration = 0
self.angular_velocity = 0
# 擺錘位置
x, y = math.sin(self.angle_rad), math.cos(self.angle_rad)
self.bob_position = self.pivot + self.arm_length*pygame.Vector2(x, y)
# 阻尼
self.damping = 0.995
def update(self):
# 重力加速度
gravity = 0.4
self.angular_acceleration = -gravity*math.sin(self.angle_rad)/self.arm_length
self.angular_velocity += self.angular_acceleration
self.angle_rad += self.angular_velocity
x, y = math.sin(self.angle_rad), math.cos(self.angle_rad)
self.bob_position = self.pivot + self.arm_length*pygame.Vector2(x, y)
self.angular_velocity *= self.damping
def show(self):
pygame.draw.line(self.screen, (0, 0, 0), self.pivot, self.bob_position)
pygame.draw.circle(self.screen, (0, 0, 0), self.bob_position, 16)
在設計Pendulum類別時,我們加入了阻尼(damping),來讓單擺擺動幅度越來越小,這樣子模擬出來的效果,會比較像真實世界中單擺的擺動方式。
先前我們分析所得到的結果,都是針對具理想化性質的單擺所做的分析和推導。這也就是說,我們不僅假設擺錘的質量集中在中心點的位置,同時也沒有考慮樞軸的摩擦力、擺臂的重量、空氣阻力、擺臂是不是會彎曲等等問題;這些在真實世界中,都會對單擺的運動造成影響。不過,畢竟在模擬世界中的單擺,不需要鉅細靡遺地去斤斤計較這麼多,只要它擺動的方式,看起來跟在真實世界中的擺動方式一樣就可以了。在真實世界中的單擺,不管設計再精良,擺錘的擺動幅度,一定會越來越小,最後停止擺動。那要怎麼讓我們模擬出來的單擺,也有這樣子的特性呢?
要讓模擬世界中的單擺擺動幅度越來越小,做法很簡單,只要加個阻尼,讓每一幀的角速度都比原來小一點就可以了。程式可以這樣寫:
angular_velocity *= damping
這裡的damping裡頭放的,是一個小於1的數字。這樣子,當每次計算角速度時,都會比原先的數值小一些,進而使得擺錘的擺動幅度越來越小,到最後停止擺動。
最後,需要提到的是,在設計Pendulum類別時,原書是把計算擺錘位置的程式碼,放在show()方法中,而在這裡,則是放在update()方法中。之所以會如此做,是因為在模擬時,我們不見得會想要畫出擺錘。這時,如果依照原書的設計方式,我們不會執行show(),那當然也就不會知道擺錘的位置在哪裡。所以,把計算擺錘位置的程式寫在update()中,讓處理系統狀態的部分和處理呈現畫面部分的功能各自獨立,這樣子才不會糾纏不清,應該會是比較好的做法;事實上,先前在設計Mover()類別時,就是這麼做的。
Example 3.11: Swinging Pendulum
# python version 3.10.9
import math
import sys
import pygame # version 2.3.0
pygame.init()
pygame.display.set_caption("Example 3.11: Swinging Pendulum")
WHITE = (255, 255, 255)
WIDTH, HEIGHT = screen_size = (640, 360)
screen = pygame.display.set_mode(screen_size)
FPS = 60
frame_rate = pygame.time.Clock()
# 樞軸位置
x, y = WIDTH//2, 10
# 擺長
arm_length = 225
# 擺角,單位是「度」
angle_deg = 45
pendulum = Pendulum(x, y, arm_length, angle_deg)
while True:
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
sys.exit()
screen.fill(WHITE)
pendulum.update()
pendulum.show()
pygame.display.update()
frame_rate.tick(FPS)
Exercise 3.15
# python version 3.10.9
import math
import sys
import pygame # version 2.3.0
pygame.init()
pygame.display.set_caption("Exercise 3.15")
WHITE = (255, 255, 255)
WIDTH, HEIGHT = screen_size = (640, 360)
screen = pygame.display.set_mode(screen_size)
FPS = 60
frame_rate = pygame.time.Clock()
# 單擺數量
n = 5 # number of pendulums
# 樞軸位置
x, y = WIDTH//2, 5
# 擺長
arm_length = 50
# 擺角,單位是「度」
angle = 25 # in degree
pendulums = [Pendulum(x, y, arm_length+7*i, angle+5*i) for i in range(n)]
# 把所有單擺的阻尼都設為1,讓它們永遠都動個不停,這樣看起來會更有趣
for pendulum in pendulums:
pendulum.damping = 1
while True:
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
sys.exit()
screen.fill(WHITE)
pendulums[0].update()
for i in range(1,n):
# 把樞軸放在上一個單擺擺錘的位置上
pendulums[i].pivot = pendulums[i-1].bob_position
pendulums[i].update()
for pendulum in pendulums:
pendulum.show()
pygame.display.update()
frame_rate.tick(FPS)
Exercise 3.16
正向力的大小為Fgravity cosθ
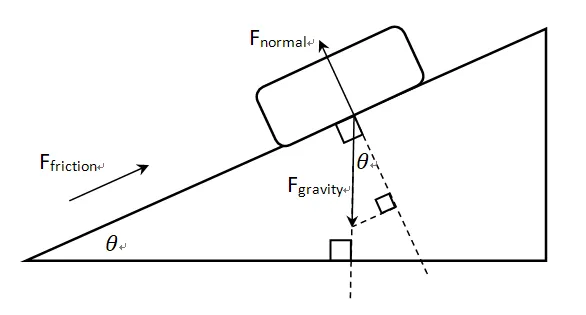
Exercise 3.17
假設方塊的質量是m,而重力加速度是g,則
Fgravity = mg
若斜面的摩擦係數是μ,因方塊下滑的力道為Fgravity sinθ,而摩擦力為-μFgravity cosθ,所以合力為Fgravity(sinθ - μcosθ)。換句話說,當sinθ ≤ μcosθ時,方塊是靜止不動的。
class Box:
def __init__(self, x, y, mass):
# 取得顯示畫面的大小
self.screen = pygame.display.get_surface()
self.width, self.height = self.screen.get_size()
# 讓傳遞進來的數值來決定物體的質量
self.mass = mass
# 物體的質量越大,尺寸就會越大
self.size = 16*self.mass
# box的傾斜角度
self.angle_deg = 0
# 垂直於斜面,長度為box邊長一半的向量
u = pygame.Vector2(self.size/2, 0).rotate(self.angle_deg+45)
# box在斜面上的起始位置
self.position = pygame.Vector2(x, y) - u
# 物件的初始速度、初始加速度
self.velocity = pygame.Vector2(0, 0)
self.acceleration = pygame.Vector2(0, 0)
# 設定box所在surface的格式為per-pixel alpha
self.surface = pygame.Surface((self.size, self.size), pygame.SRCALPHA)
def apply_force(self, force):
self.acceleration += force/self.mass
def update(self):
self.velocity += self.acceleration
self.position += self.velocity
self.acceleration *= 0
def show(self):
rect = pygame.Rect(0, 0, self.size, self.size)
pygame.draw.rect(self.surface, (0, 0, 0, 50), rect)
rotated_surface = pygame.transform.rotate(self.surface, self.angle_deg)
rect_new = rotated_surface.get_rect(center=self.position)
self.screen.blit(rotated_surface, rect_new)
def check_edges(self):
if self.position.x - self.size/2 < 0:
self.position.x = self.size/2
self.velocity *= 0
if self.position.y + self.size/2 >= self.height:
self.position.y = self.height - self.size/2
self.velocity.y = 0
class Incline:
def __init__(self, x, y, angle_deg):
# 取得顯示畫面的大小
self.screen = pygame.display.get_surface()
self.width, self.height = self.screen.get_size()
# 斜面的傾斜角度,單位是「度」
self.angle_deg = angle_deg
# 斜面頂部位置
self.top = pygame.Vector2(x, y)
# 斜面底部位置
dy = self.height - y
dx = dy/math.tan(math.radians(angle_deg))
self.bottom = pygame.Vector2(x-dx, self.height)
def on_incline(self, position_x):
# 假設物體已在斜面上,所以只檢查水平位置
x1, x2 = self.top.x, self.bottom.x
x_max, x_min = max(x1, x2), min(x1, x2)
if x_min <= position_x <= x_max:
return True
else:
return False
def show(self):
pygame.draw.line(self.screen, (0, 0, 0), self.top, self.bottom)
def friction_force(mu, velocity, N=1):
if velocity.length() > 0:
v_hat = velocity.normalize()
else:
v_hat = pygame.Vector2(0, 0)
return -mu*N*v_hat
# python version 3.10.9
import math
import sys
import pygame # version 2.3.0
pygame.init()
pygame.display.set_caption("Exercise 3.17")
WHITE = (255, 255, 255)
width, height = screen_size = 640, 360
screen = pygame.display.set_mode(screen_size)
FPS = 20
frame_rate = pygame.time.Clock()
# 斜面頂部位置
x, y = 600, 150
# 斜面傾斜角度
angle_deg = 45
angle_rad = math.radians(angle_deg)
incline = Incline(x, y, angle_deg)
slide_direction = (incline.bottom - incline.top).normalize()
# box質量
mass = 3
box = Box(x, y, mass)
# 重力加速度
g = 1
# 斜面及水平面的摩擦係數
mu = 0.8
# 方塊是否正在滑下
sliding = True if math.sin(angle_rad)-mu*math.cos(angle_rad)>0 else False
while True:
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
sys.exit()
screen.fill(WHITE)
if incline.on_incline(box.position.x):
box.angle_deg = incline.angle_deg
if sliding:
slide_force = mass*g*math.sin(angle_rad)*slide_direction
normal_force = mass*g*math.cos(angle_rad)
friction = friction_force(mu, slide_direction, normal_force)
net_force = slide_force - friction
else:
# 方塊為靜止狀態,合力為0
net_force = pygame.Vector2(0, 0)
else:
# 讓方塊滑到底部之後往前翻滾
if box.position.x + box.size/2 >= incline.bottom.x:
box.angle_deg += 5
else:
box.angle_deg = 90
# 在底部滑動時,如果算出來的摩擦力方向反轉,代表方塊已呈靜止狀態,
# 而摩擦力已由動摩擦力轉變成靜摩擦力,所以合力應為0
friction = friction_force(mu, box.velocity, mass*g)
if friction.x < 0:
box.velocity = pygame.Vector2(0, 0)
net_force = pygame.Vector2(0, 0)
else:
net_force = friction
box.apply_force(net_force)
box.update()
box.check_edges()
box.show()
incline.show()
pygame.display.update()
frame_rate.tick(FPS)