前導
為了定義極座標系,我們首先固定一個原點 O(稱為極點),並從 O 引出一條初始射線(如下圖)。通常會選擇正 x 軸作為初始射線。
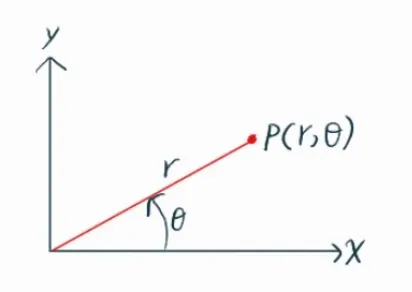
(r,θ) 來表示,其中:- r 是從 O 到 P 的有向距離,
- θ 是從初始射線到射線 OP 的有向角度。
因此,點 P 可表示為:
觀念釐清
就如同在三角學中,角度 θ 如果是逆時針方向量測則為正值,若是順時針方向量測則為負值。
一個點所對應的角度並不是唯一的。雖然平面上的一個點只有唯一一組直角座標,但它卻有無限多組的極座標表示方法。
例如: 從原點出發,沿著

其極座標為:
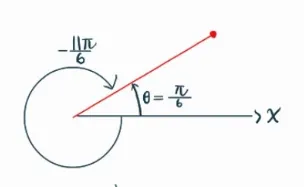
但這個點也可以表示成
見下圖:
在某些情況下,我們也會允許 r 為負值,這就是為什麼極座標的定義中會提到有向距離。
例如,點

可以這樣到達:

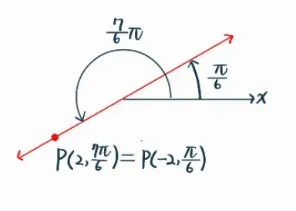
但這個點也可以這樣表示:

見下圖:
好,現在請你想想,當我們對極座標「固定一個變數、讓另一個變數變化時」所畫出的圖形應該會是:
- 固定 r:畫出的是圓。
- 固定 θ:畫出的是直線。
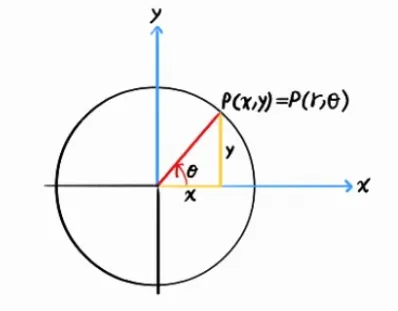
我們來練習幾題極座標的繪製看看:
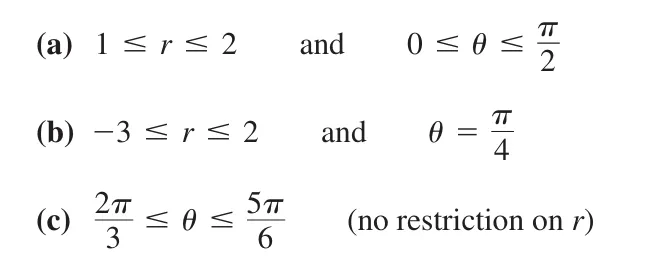
三題圖形由上到下分別繪製如下:
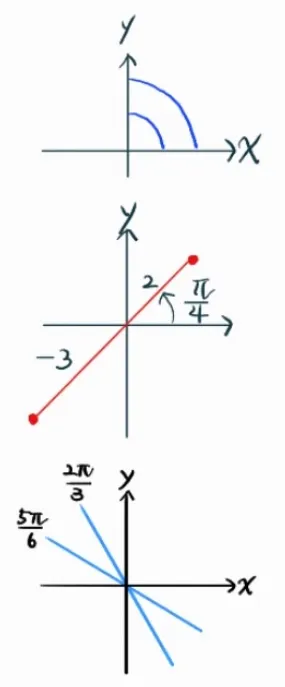
- 注意: 第三題對 r 並沒有限制。
極座標與直角座標的轉換公式
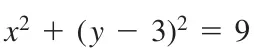
當我們在同一平面中同時使用極座標與直角座標時,會將兩者的原點對齊,並將極座標的初始射線設定為直角座標的正 x 軸。
此時,在這樣的設定下,見下圖:
極座標與直角座標之間可以用以下公式進行轉換:

這些公式讓我們可以在兩種座標系統之間來回轉換,舉例來說:

例如:
給定下列圓方程式,我們要找出它的等校極座標表達式:
這時只要我們套用剛剛的轉換公式:
步驟 1: 展開平方項:

步驟 2: 兩邊消去 9:

步驟 3: 代入極座標轉換公式得到:
步驟 4: 因式分解:
所以有兩種情況: